-3.png?height=120&name=MecaLogo-Black%20(1)-3.png)
|
|
 |
 |
 |
-3.png?width=335&height=96&name=MecaLogo-Black%20(1)-3.png)
This MecaNetwork example features the Meca500 industrial arm, the MPM500 pneumatic module and the Bimba (Vaccon) JS-150-AA4 venturi vacuum pump. The venturi pump is directly connected to the MPM500 pneumatic module. A suction cup can be added to the venturi in order to use its vacuum as a pick-and-place tool. The provided demo showcases a hold-and-release example with a simple common use suction cup.
Components
Not all components used for this example are sold by Mecademic Robotics.
- Meca500 Robot: Go to link
- Meca500 firmware version 8.1.6 or above is required: Go to link
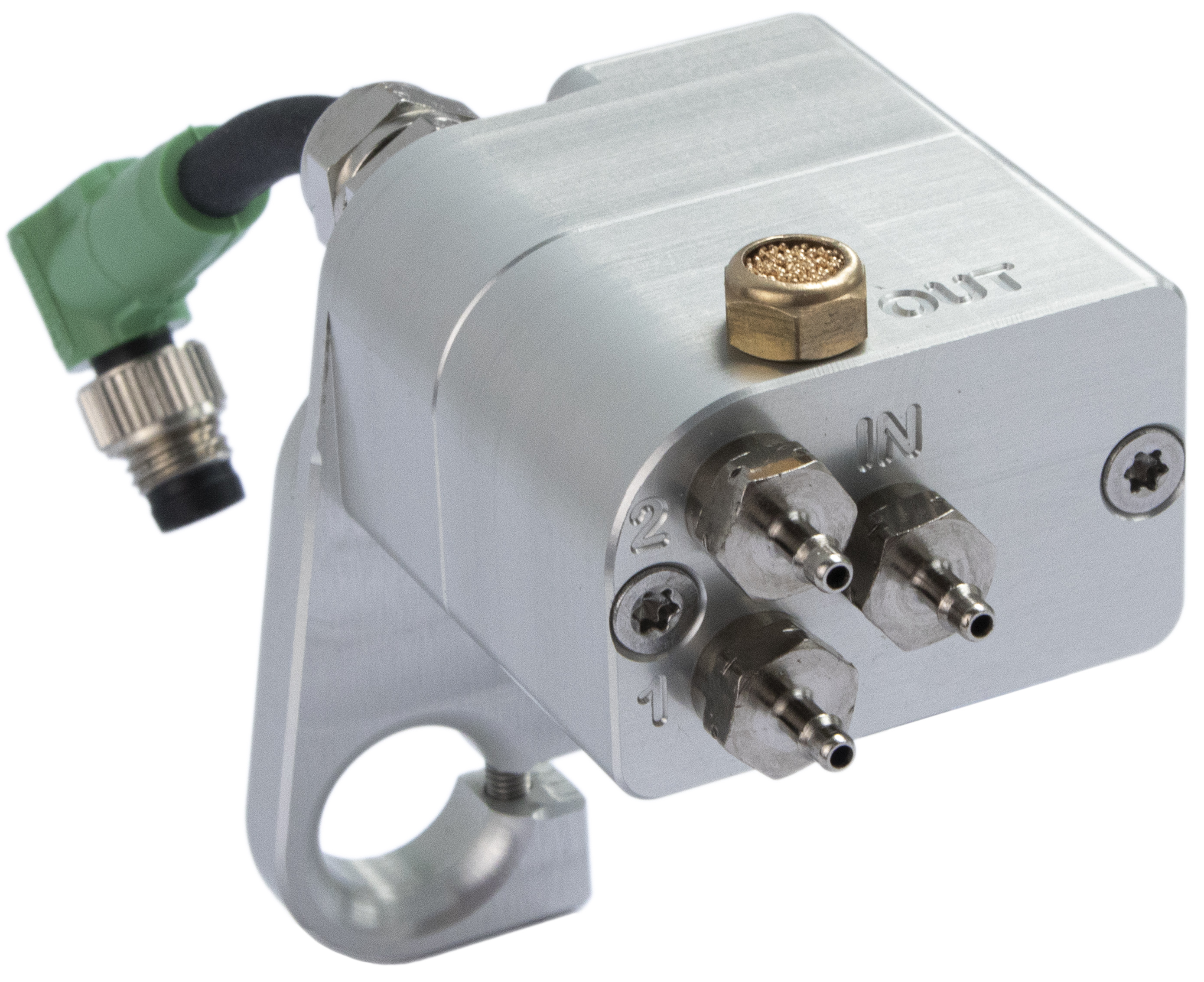
- Mecademic MPM500 pneumatic module: Go to link
- Bimba JS-150M-AA4: Go to link
- Common suction cup: Purchased separately, McMaster reference
- M5 threaded barb fittings: Included with the MPM500 module OR Push-to-connect barb fittings: McMaster reference
- 1/8 NPT barb fittings: Provided with the venturi pump or purchased separately
- 1/16 in ID or 4 mm OD pneumatic cables: Purchased separately
Technical specifications of the venturi pump
- Miniature fixed venturi
- Operating pressure: 80 psi
- Size: 4.2 x 0.75 x 0.75 in
- Weight: 0.12 lb
Assembly
Before assembly or operation, please refer to the Meca500 User Manual and the MPM500 User Manual.
It is also recommended to visit the How to install the MPM500 pneumatic module page in order to ensure a functioning set-up before adding the gripper. The article lists the assembly steps required after the successful installation of the MPM500 pneumatic module. There are two possible ways to do the connections
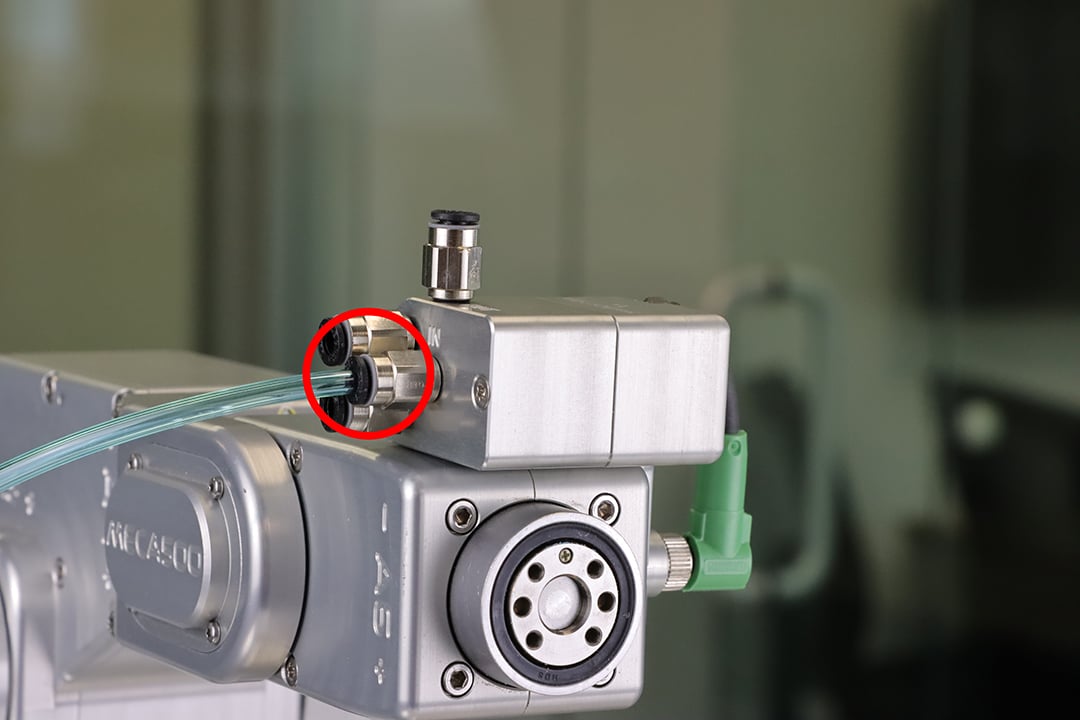
Assembly steps (version 01):
- Attach port P+ (venturi) to air input (external);
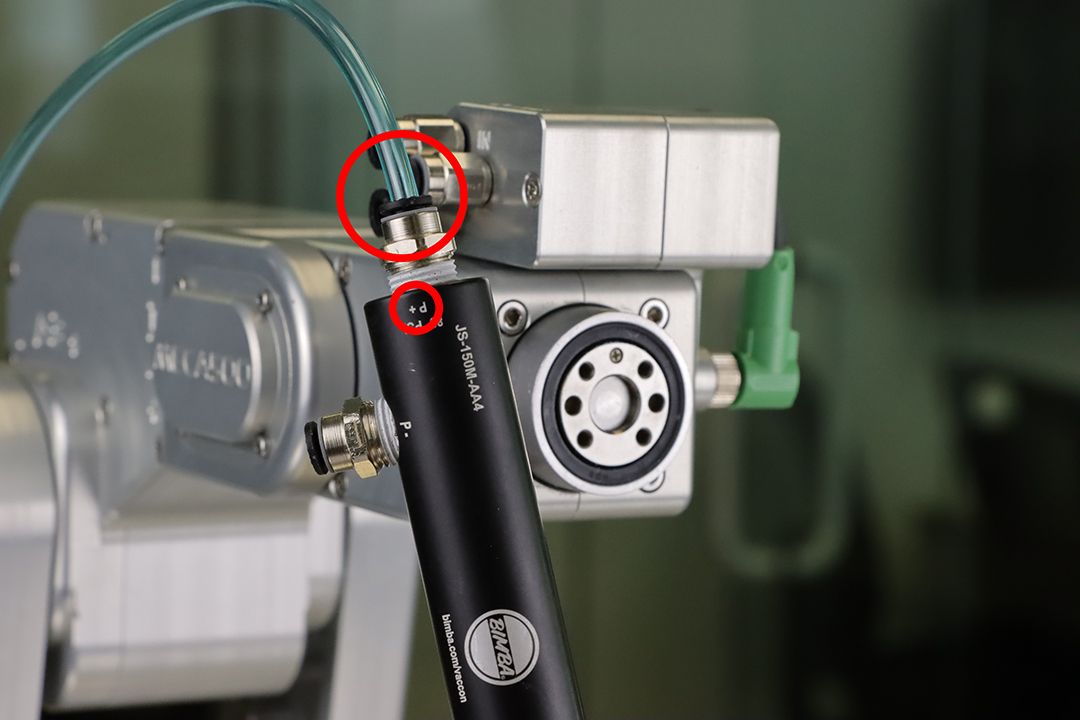
- Attach port P- (venturi) to port OUT (Meca500);
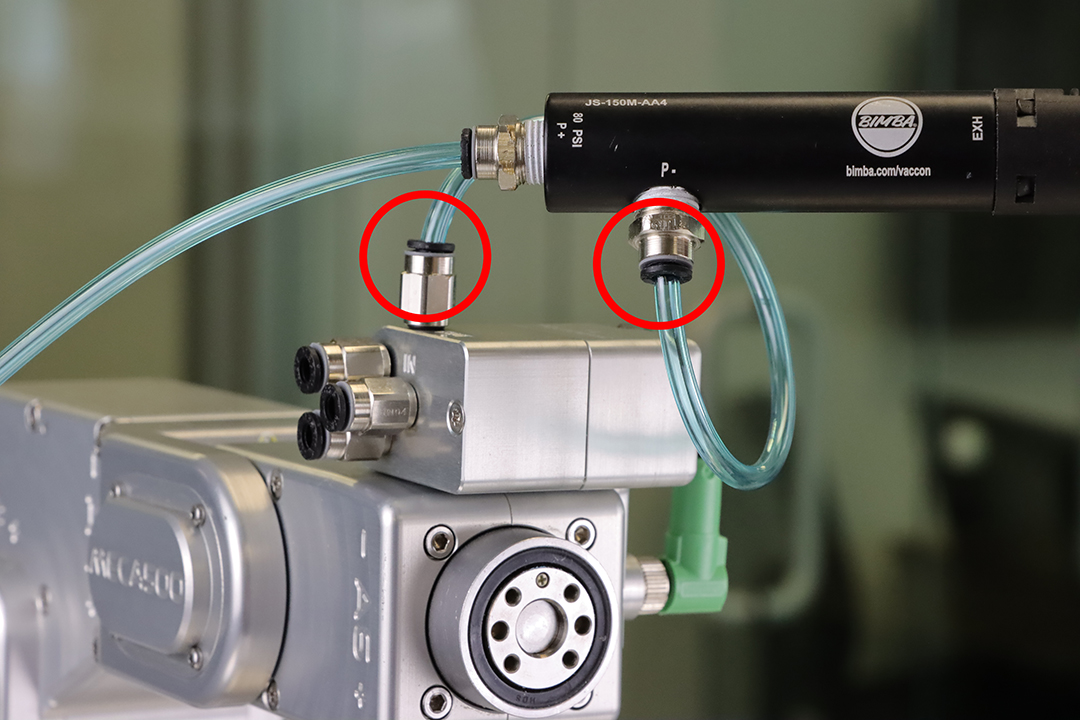
- Attach suction cup to port 1 (Meca500);
- Optional: add the pneumatic muffler to reduce noise.
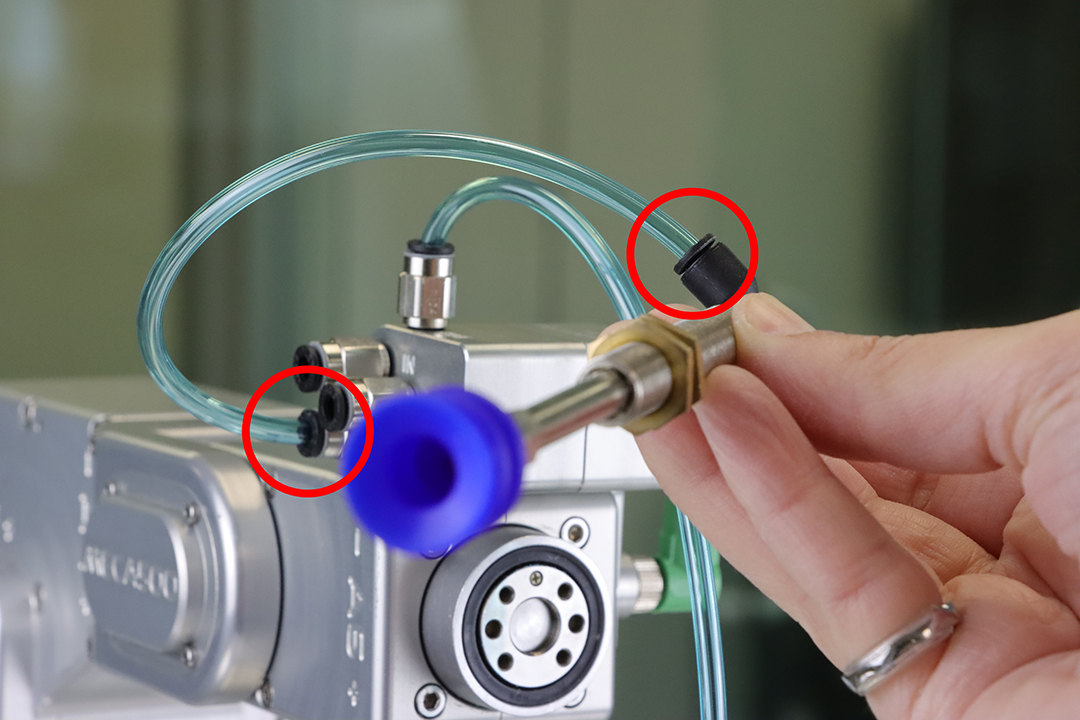
Assembly steps (version 02):
- Attach air input (external) to port IN (Meca500);
- Attach port 1 (Meca500) to port P+ (venturi);
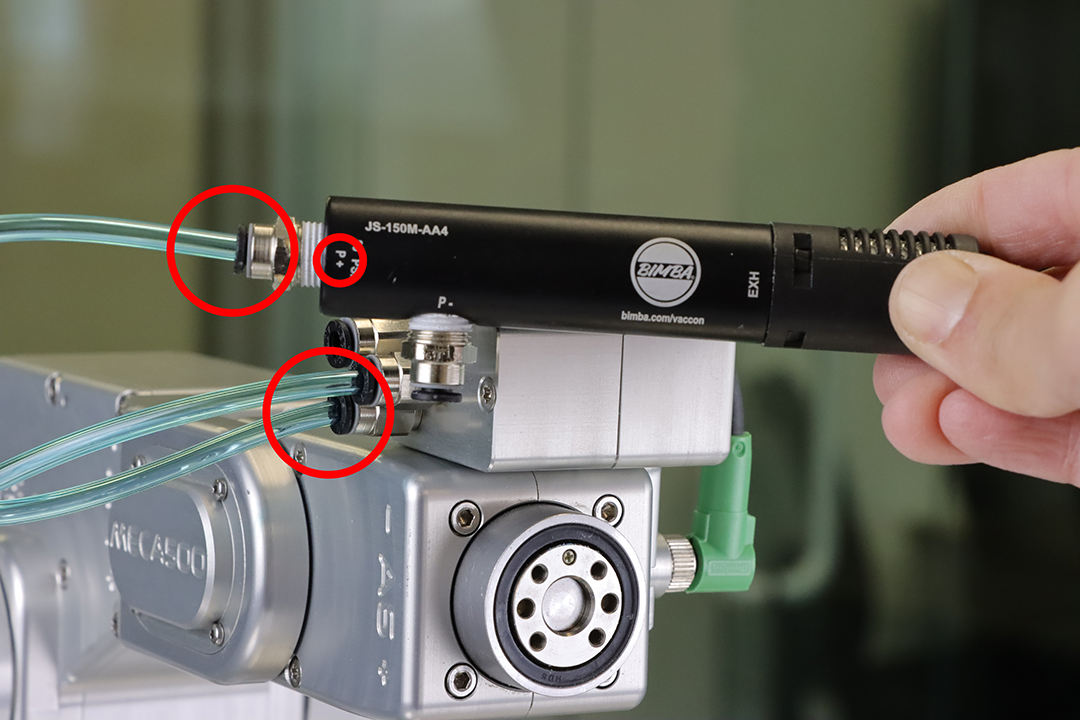
- Attach P- (venturi) to the suction cup.

Web interface script
The vacuum pump's action can be tested with the Meca500's web interface. To learn how to use the web interface, please read the Programming Manual. Simply write and execute the GripperOpen and GripperClose commands to confirm that all connections are working. A simple hold-and-release command sequence is presented below. The sequence positions the robot with the MovePose() and MoveLin() commands. The vacuum is the activated in order to seize the object, before placing it somewhere.
MovePose(215.813,1.282,144.232,20.74,82.846,-19.853)
MoveLin(214.355,1.239,108.308,138.4,86.206,-138.008)
GripperCloseDelay(1)
MovePose(174.313,116.071,145.192,-78.995,58.707,81.526)
MoveLin(173.682,115.627,114.353,-95.307,59.052,94.893)
GripperOpenDelay(1)
MovePose(174.516,116.213,134.623,-84.534,59.046,86.056)
MoveLin(173.682,115.627,114.353,-95.307,59.052,94.893)
GripperCloseDelay(1)
MovePose(215.813,1.282,144.232,20.74,82.846,-19.853)
MoveLin(214.355,1.239,108.308,138.4,86.206,-138.008)
GripperOpenDelay(1)
MoveJoints(0,0,0,0,0,0)
Please note that these examples are provided as-is by either Mecademic or it's Partners. These can be used as starting point for development and testing but Mecademic or it's partners are not under obligation to provide support and are not liable for any errors or unintended behavior caused by the examples. These examples could be updated over time.