-3.png?height=120&name=MecaLogo-Black%20(1)-3.png)

Prior to running the new firmware
- If running the system in production, always make sure to test it thoroughly before running the new firmware to make sure your process is not affected.
- Please read the release notes located in the downloaded firmware folder.
- If upgrading from release 7 to release 8, please read the Migration Guide attached.
- The most recent firmware version compatible with the Meca500 R2 is v8.4.7
The oldest version compatible with the Meca500 R3 is V7.
The Meca500 R4 is compatible with version 9.2.1 and above. - If you have any questions, please reach out to Mecademic Support.
Installing the firmware
Firmware for the Meca500 can be found here.
Note: The downloaded folder needs to be unzipped. You will find the following inside:
- Meca500_E_LD_vX.X.X.XXXX-official UPDATE File: This is the firmware update to be loaded from the Web Interface
- m500_exttools_vX.X.XXXX-official UPDATE File: This is the firmware update for the gripper only.
- Meca500_EtherCAT_ESI XML Document : This is the ESI file to be used with EtherCAT
- GSDML-V2.42-Mecademic-meca500 XML Document : This is the GSDML file to be used with Profinet.
- Meca500_vX.X.X.XXXX-official.eds EDS Document : This is the EDS file to be used with Ethernet/IP
- PDF File: This is the release notes
To update the firmware of the robot, you must connect the robot to a PC, then call its web interface via a web browser. To proceed with the update, the robot must be deactivated and the connection icon unchecked:
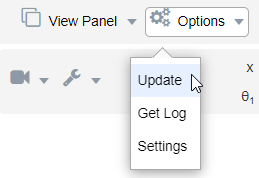
In firmware version prior to v9.3:

Then, you must select Options → Update
- The update should take under 20 minutes, if you see that it is taking longer, please refresh your browser.
- It is suggested to restart the robot after the update is complete.
In firmware version after v9.3:
Connect to the robot but do not activate the motors

Then using the Menu button, navigate to the Update firmware section
![]()

Using the Browse button, you can navigate and select the update file in your files.